Architecture électronique
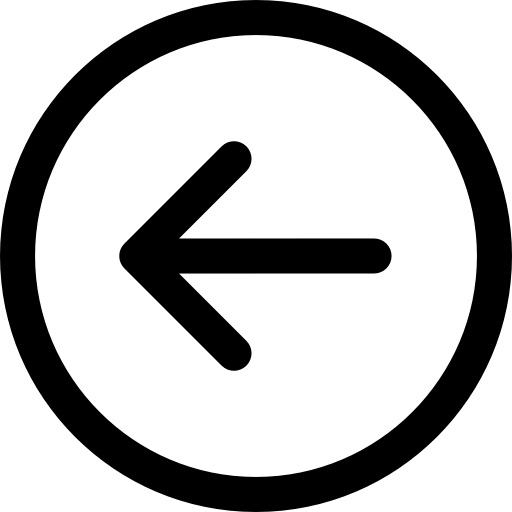
Bloc Acquisition :
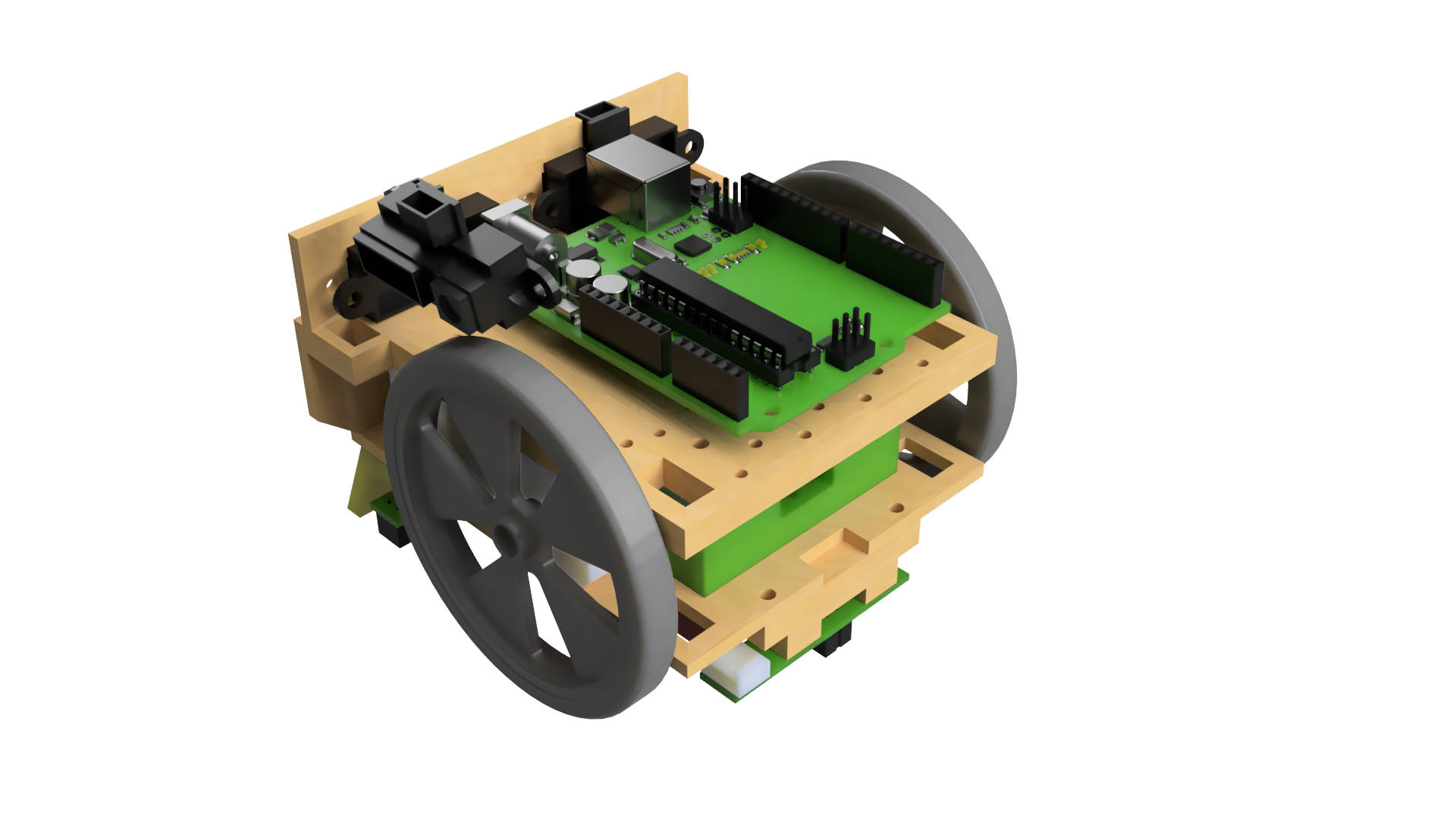
Pour répondre à l’exigence EXIG_ADVERSAIRE et EXIG_FUITE le robot calcule l'emplacement de l’adversaire grâce à 3 capteurs optiques Sharp GP2Y0A41SK0F. Nous allons en mettre deux devants et un sur le côté gauche.
Pour répondre à l’exigence EXIG_DEPART le robot doit recevoir un signal infrarouge provenant d’une télécommande grâce à un récepteur infrarouge, ce qui permet de le mettre en marche.
Afin de respecter les règles du combat de sumo, le robot doit capter s’il sort du dohyo grâce à deux capteurs optiques de contraste CNY70. Nous allons mettre un capteur de ligne devant et derrière.
Bloc Traitement :
Pour répondre à l’exigence EXIG_COMBAT le robot est capable d'effectuer des fonctions de traitement grâce à un microcontrôleur ATMEGA328P-PU.
Bloc Action :
Pour répondre à l’exigence EXIG_DEPLACEMENT le robot est libre de déplacement grâce à deux moteurs GM9 sur RM3.
Pour répondre à l’exigence EXIG_DEPLACEMENT un pont en H de référence DRV8835 alimente les moteurs.
Bloc Énergie :
Pour répondre à l’exigence EXIG_AUTONOMIE une batterie LIPO 2S 7,4V alimente le système.
Pour répondre à l’exigence EXIG_INTERUPTEUR un interrupteur contrôle l’alimentation du système.
Pour répondre à l’EXIG_SECUR_BATT, un pont diviseur de tension sera fait en sortie de la batterie et dont la sortie sera reliée à une entrée analogique du microcontrôleur.
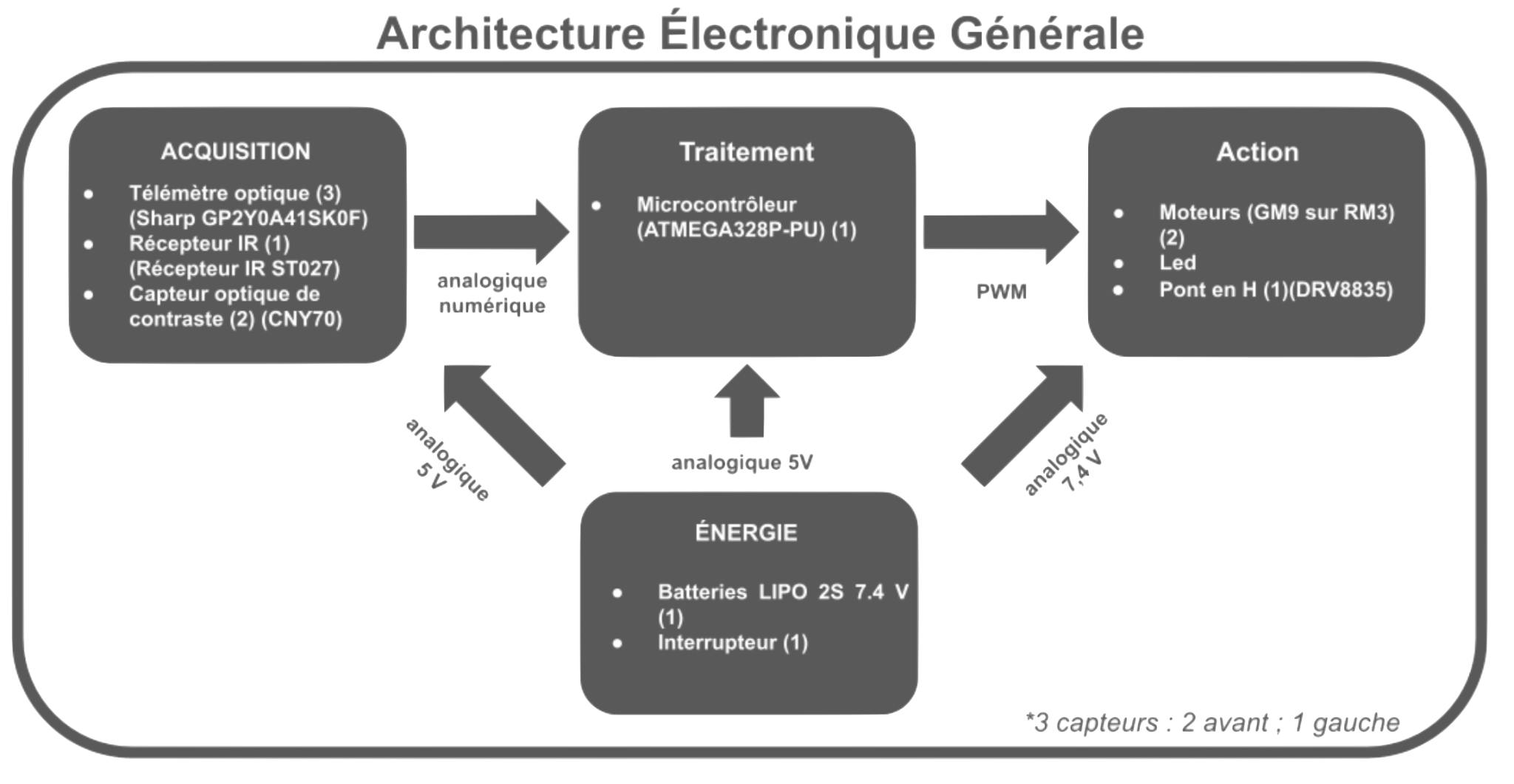
Architecture informatique
Compétence validée dans les projets suivants :
SAE : Lévitator

SAE : Radiogoniometrie
SAE : Robot sumo

SAE : Kart à hélice